人類皮膚柔軟且富有彈性,擁有數百萬個神經末梢,可以感知熱量和觸控。這使其成為檢測和響應外部世界的絕佳工具。在過去的 40 年裡,工程師們一直致力於在合成版本中重現這些能力,但這些嘗試始終未能達到活體皮膚的多功能性和適應性。然而,現在,新的研究正在增加更多的能力和複雜性,使該領域更接近其最終目標:電子皮膚,或稱 e-skin,其用途範圍從覆蓋機器人到將可穿戴裝置貼上到人體上。有一天,這些裝置甚至可能讓人類遠端控制機器人並“感受”它們檢測到的訊號。
格拉斯哥大學可彎曲電子和感測技術小組負責人、電子和奈米工程教授拉溫德·達希亞說:“在 20 世紀 80 年代,我們開始看到一些觸控感測器,你可以稱之為皮膚的粗略版本。” 第一批所謂的柔性感測器陣列是在 20 世紀 80 年代中期製造的。其中一個陣列使用了 Kapton,這是一種在 20 世紀 60 年代發明的柔性但不可拉伸的薄膜,用於支撐紅外感測器和探測器的排列。這種“皮膚”包裹在一個簡單的機械臂上,使肢體能夠與人類芭蕾舞演員“共舞”:如果她距離手臂 20 釐米以內,它就可以感知她的動作並透過自發修改自身動作來做出反應。
但與生物皮膚的能力相比,這些能力仍然非常初級。可用的材料和電子產品在 21 世紀初得到了改進,變得更柔軟、更靈活,最重要的是,可拉伸。達希亞說,這些改進使研究人員能夠將新的感測器和電子裝置整合到完全開發的皮膚系統中。這樣的系統包括一個可以彎曲和拉伸的類皮膚基底,配備電源、各種感測器以及將感測器資訊傳送到中央處理器的方法。
支援科學新聞報道
如果您喜歡這篇文章,請考慮透過以下方式支援我們屢獲殊榮的新聞報道 訂閱。透過購買訂閱,您正在幫助確保有關塑造我們今天世界的發現和想法的具有影響力的故事的未來。
觸控和溫度感測器是為此類系統開發的首批感測器。加州理工學院的生物醫學工程師魏高決定嘗試將這些感測器與可以檢測化學物質的感測器結合起來。高說:“我們想創造一種具有物理感測能力的機器人皮膚——基本上是人們已經做的事情。” “此外,我們還想賦予它強大的化學感測能力。” 他的團隊的工作在本月早些時候發表在《科學機器人學》雜誌上。
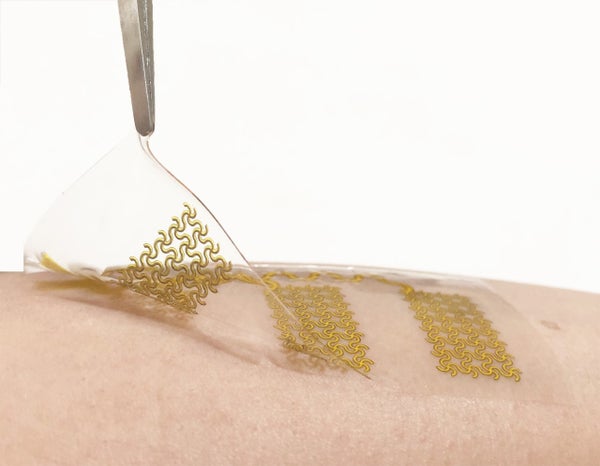
高的實驗室使用噴墨印表機在柔軟的水凝膠基底內分層列印由奈米材料製成的專用墨水——微觀金屬、碳或其他化合物的混合物。透過使用不同的奈米材料墨水進行列印,每種墨水都配製為檢測特定的化學物質,高的團隊開發出了可以感知爆炸物、神經毒劑(例如化學戰中使用的那些)甚至病毒(例如導致 COVID 的 SARS-CoV-2)的皮膚。研究人員還加入了先前開發的壓力和溫度感測器。由此產生的電子皮膚看起來像一個透明的創可貼,表面嵌入了金屬圖案。

生物醫學工程師魏高的實驗室創造的電子皮膚。放置在人前臂上的貼片可以控制附近的機械臂。當放置在機械手上時,皮膚可以讓機器人“感覺”到它握著什麼。圖片來源:魏高/加州理工學院
感知環境並非這種皮膚的全部功能。高說:“我們還想確保人機互動能夠參與其中。” 為了實現這一目標,該團隊開發了一個人工智慧程式,以實現兩個電子皮膚貼片之間的連線——一個在機器人上,另一個在人體上。皮膚列印過程是可擴充套件的,因此研究人員能夠為機械手列印指尖大小的貼片,併為人體前臂列印更大的貼片。這種皮膚使機器人能夠“感覺”到它抓握物體的力度,並感知物體是否塗有特定的化學物質。與此同時,人類獲得了遠端控制連線機器人的能力,並在機器人檢測到這些化學物質時感受到來自機器人的電訊號。研究人員表示,這種互動有一天可能讓機器人代替人類控制器,就像一個物理化身,出現在不適合人類居住的地方。
高的專案需要一個外部裝置來處理電子皮膚的感測器資料。使用了多層金屬墨水——用於感測和穩定以及將感測器資料無線傳輸到附近的計算機或手機進行收集和處理的層。但這並不是機器人皮膚分析其拾取資訊的唯一方法。其他實驗室正在研究能夠自行篩選資訊的皮膚,類似於人類神經系統的工作方式。
達希亞以人類皮膚為靈感,用於他的電子皮膚的資料處理,這在同樣於本月發表的兩篇獨立的《科學機器人學》文章中進行了描述。他說,使用電子構建塊,例如電晶體和電容器,“我們可以開發出類似於外周神經系統的東西。” 在他的系統中,來自感測器的訊號必須達到某個閾值才能傳送到中央處理器。這減少了任何一次傳送的資料量。達希亞解釋說:“你不能傳送無限的資料。” “如果你想傳送大量資料,那麼你必須有一些安排,讓資料可以排隊並等待前面的資料。”
達希亞指出了他的團隊開發的觸控感測器,該感測器使用微小的電晶體——控制電流流入和流出其他電子元件的裝置——來幫助機器人皮膚感受和學習。按壓皮膚中的電晶體會導致電流發生變化,從而使機器人“感覺”到壓力。隨著時間的推移,它可以調整其對檢測到的壓力量的反應。“這些都是類似於神經元的電晶體,可以學習,可以適應,”他說。他補充說,皮膚學習了機器人等同於疼痛的東西,因此在感覺到“疼痛”之前不會傳輸訊號。
除了遠端控制機器人或教它們適應環境外,電子皮膚還可以有許多其他應用。卡內基梅隆大學的機械工程師卡梅爾·馬吉迪說:“我認為,很多機會並非針對機器人。” 他的實驗室專門開發用於與人體相容的電子裝置的軟性材料。馬吉迪設想電子皮膚可以成為機器人以及更普通的物體的良好感測器。例如,它們可以成為互動式電子裝置的柔軟、柔性觸控板的基礎,或者成為能夠檢測極端溫度和其他環境條件的敏感服裝或裝飾材料的基礎。這種皮膚也可能在醫學領域有所幫助。馬吉迪說:“那裡的想法是[你]想要這些機器人皮膚作為可以貼在身上的貼紙,你可以立即跟蹤你的生命體徵。”
當談到商業用途時,目前的電子皮膚原型仍然存在需要解決的問題。耐用性是一個重要的問題,高指出。“有很多發展。人們已經非常接近了,”他說。“但[電子皮膚]的關鍵挑戰之一是長期執行的可靠性和穩健性。” 即使存在這些挑戰,高說在未來五年內,工業環境中可能會出現機器人皮膚。
關於商業可用性,馬吉迪說:“限制因素實際上與其說是機器人皮膚——這些技術已經存在。我認為更多的是需求。” “我們仍然沒有家裡的機器人。” 但考慮到電子皮膚的所有可能應用,他說與工程領域以外的各方合作至關重要。“那些不是機器人專家的人,那些不是工程師的人,不應該覺得他們參與該領域存在難以逾越的障礙,”他說。馬吉迪建議,潛在的合作者可能是使用可以配備電子皮膚感測器的假肢的人,或者患有慢性病並可能從透過可穿戴貼片進行持續監測中受益的人。
他說:“軟性機器人技術是如此跨學科。” “你不需要擁有[工程]系或機器人研究所的學位就可以做出重要貢獻,並確保這些技術在現實生活中獲得成功應用。”