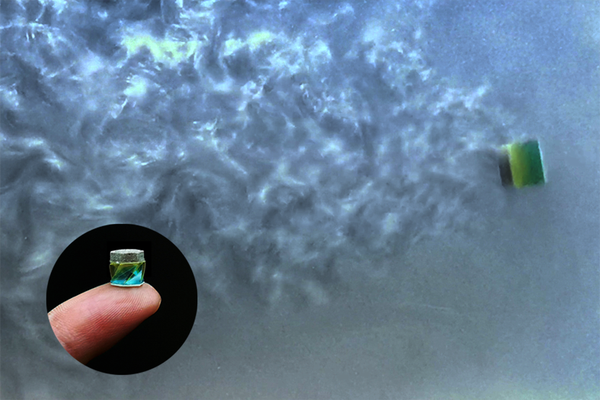
一種新型空心、豌豆大小的機器人可以滾動、翻轉和跳躍來導航周圍環境。它可以輕鬆地從乾燥的表面過渡到液態水池,使其成為完全兩棲的。它能夠在多種環境中以不同型別的運動方式(同時攜帶貨物)脫穎而出,這使其有別於其他微型機器,後者大多隻能以單一方式移動。這種新型機器人的多功能性也使其非常擅長穿越、跨越和繞過障礙物。有一天,它的小尺寸和多功能性可能使其能夠在人體複雜的環境中導航,並將靶向藥物有效載荷輸送到有需要的患者體內。
該機器人克服物理障礙的能力源於獨特的設計:摺疊成稱為克雷斯林圖案的摺紙結構,頂部裝有磁鐵。克雷斯林圖案看起來像一系列堆疊的直角三角形環繞著機器人的腹部,使其看起來像一個有脊且略微扁平的圓柱體。這些脊也賦予它螺旋槳般的形狀,有助於它在液體中移動。“我們真正想看到的是,我們是否可以將幾何特徵與摺紙設計的可摺疊性相結合,以實現[機器人]的有效導航,並利用其可摺疊機制進行藥物輸送,”斯坦福大學機械工程助理教授趙芮妮(Renee Zhao)說。她和她的同事在週二發表於《自然-通訊》(Nature Communications)雜誌上的一篇論文中描述了這款機器人。
一個集成了旋轉多模式運動、貨物運輸和靶向藥物輸送功能的摺紙微型機器人在實驗室障礙賽道中翻滾。圖片來源:Renee Zhao,斯坦福大學機械工程系
關於支援科學新聞報道
如果您喜歡這篇文章,請考慮透過以下方式支援我們屢獲殊榮的新聞報道: 訂閱。透過購買訂閱,您正在幫助確保有關塑造我們當今世界的發現和想法的具有影響力的故事的未來。
一端的小孔可以進入機器人的空心中心,中心可以容納少量有效載荷:物體或一些液體。另一端的磁鐵使機器能夠進行無線控制——操作員只需要自己的磁鐵。研究人員使用的磁場型別類似於磁共振成像(MRI)機器產生的磁場型別,趙解釋說。“我認為一種策略是開發這種機器人,使其與 MRI 系統相容,”她說,以便在患者處於成像機器中時對其進行控制。趙補充說,開發一種可以生成和操縱正確型別磁場的新型裝置也是一種選擇,但這需要像 MRI 機器一樣結合醫學成像來跟蹤機器人在體內的位置。
新型機器人的某些版本在其柔軟的圓柱形結構的另一側裝有第二塊磁鐵。這使得機器人可以泵送。控制磁場的操作員在磁鐵之間產生少量旋轉力,從而擠壓機器人薄薄的塑膠主體。重複此操作可以將液體從機器人的腹部泵送到周圍環境。
摺紙摺疊作為液體藥物受控輸送的泵送機制。圖片來源:Renee Zhao,斯坦福大學機械工程系
該裝置的功能不止於輸送液體有效載荷。它的螺旋槳狀形狀意味著操作員可以透過施加旋轉磁場使其旋轉,從而將其推進液體中。這種旋轉還會產生足夠的吸力,將物體吸入機器人的空心腹部。當它游泳時,旋轉運動將吸入的有效載荷保持在內部。當機器人到達目的地時,操作員可以停止旋轉,機器人就會傾倒出它拾取的任何東西。這允許將少量固體有效載荷輸送到目標位置。
用於貨物運輸的旋轉吸取機制。圖片來源:Renee Zhao,斯坦福大學機械工程系
從理論上講,這個過程可以將液體或固體藥物直接輸送到身體的特定位置——例如,可能在消化道中。趙說,該機器人的設計材料足夠柔軟,可以避免組織損傷。她指出,即使是磁鐵也是柔軟的。該團隊透過將微小的玻璃珠和金屬奈米顆粒嵌入柔軟的塑膠中製成磁鐵。研究人員證明,該機器人可以在乾燥的空豬胃以及充滿液體的豬胃中 maneuver(操縱)。他們控制了機器人的總體軌跡,但沒有必要告訴它如何繞過小的障礙物:磁場告訴它向某個方向移動,它就會滾動、翻滾或執行任何其他運動來採取該路徑。如果機器人遇到較大的障礙物,操作員可以短暫地增加磁場強度,使機器人跳躍。如果它遇到一個深水池,操作員可以改變磁場,使裝置游泳。
這種簡單設計的機器人的多功能性讓哈佛微型機器人實驗室的博士後機器人工程師徐思毅(Siyi Xu)感到驚訝,她沒有參與這項新研究。* “看到他們將這麼多功能整合到一個[設計]中非常有趣,”她說。徐補充說,許多類似的小型機器人只專注於一種運動方式,無論是行走、爬行、游泳還是飛行。
趙說,這種新的、更靈巧的摺紙設計可能成為未來微型機器人的藍圖。這可能會開啟更多的應用。“這些功能不限於特定的疾病或特定的應用,”她說。她和她的實驗室現在正在考慮如何使這些機器人更小,並能夠在血液中穿行。稍大一點的機器人可以攜帶微型攝像頭或鑷子,這對於微創醫療程式將非常有用。趙計劃繼續探索類似的裝置,在保持這些微型機器人設計簡潔性的同時,增加更多的功能。
*編者注(2022 年 6 月 15 日):此句子在釋出後經過編輯,以澄清徐思毅在哈佛微型機器人實驗室的職位。