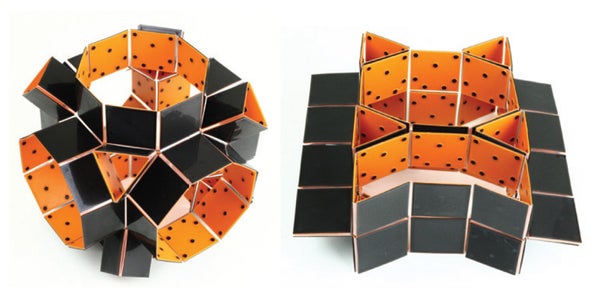
在荷蘭原子與分子物理研究所(AMOLF)的巴斯·奧弗維爾德實驗室中,這些雕塑般的物體並非看起來那麼簡單。它們由多個稜柱形積木構成,每個面都透過柔性鉸鏈連線,可以輕鬆地從 3D 星星等形狀翻轉成圓柱體、球體等。
奧弗維爾德說,想想經典的拍拍手鐲:一種具有兩個穩定位置的結構,一個伸直,一個捲曲。但他的實驗室的物體可以沿著其多個鉸鏈摺疊,在施加壓力時彈出數十個可預測的位置。除了構建這些物理物體的集合外,奧弗維爾德和他的同事還使用計算機模擬來探索更復雜的積木元件,找出許多組合可以形成的每一種潛在形狀。一些大型虛擬結構達到了 100 多個穩定配置。這項研究於去年 12 月在《自然通訊》上詳細介紹。
透過設計和模擬在被推動時摺疊成可預測形狀的物體,研究人員希望更容易製造非常小的機器人和具有可變結構的材料。如果這些物品可以輕鬆變形為特定的穩定形狀,則彎曲或組裝它們所需的工具就會更少。此外,某些形狀和內部結構可以增加強度並使物體具有彈性:例如,“骨骼具有使其更輕但保持堅硬的微觀結構,”奧弗維爾德說。“我們嘗試用我們的材料做同樣的事情。”
關於支援科學新聞報道
如果您喜歡這篇文章,請考慮透過以下方式支援我們屢獲殊榮的新聞報道 訂閱。透過購買訂閱,您正在幫助確保有關當今塑造我們世界的發現和想法的具有影響力的故事的未來。
這項研究探索了“釐米級”(大致是人手製作的傳統紙質摺紙的尺寸範圍),但奧弗維爾德指出,如果尺寸更大或更小,這些物體的工作方式將相同。目前,該團隊專注於基礎知識:“我們不是從事...小規模製造的人,”他說。“我們試圖提出新的概念。”
這些概念給奧弗維爾德在材料科學領域的同行留下了一些深刻印象。康奈爾大學領導類似研究的伊泰·科恩(Itai Cohen)表示,這項新工作在研究和意義方面是“真正的傑作”,他沒有參與這項研究。“這些都是用[相當於]紙板和雙面膠帶完成的裝置——但真正的問題是,你能開始製造機器人系統嗎?” 科恩補充道。“在機器人系統中,您可以經歷的配置數量決定了機器人能夠做多少事情,您可以製作多少[光衍射]光柵或暴露多少化學表面。”