
眾所周知,機器人的跳躍能力很差。有些機器人可以跳得很高,但不能在短時間內重複跳躍。反之亦然。加州大學伯克利分校的機器人專家和博士生鄧肯·霍爾丹意識到這一缺陷的一個影響——許多現有的機器人無法在大型間隙和高障礙物中機動,例如在災難現場進行救援工作。因此,霍爾丹轉向動物王國,研究自然界最優秀的跳躍者,希望能選擇一種作為更靈活、自主機器的模型。
霍爾丹首先建立了一個衡量標準,以評估動物可以跳多高和多快。他的進一步研究確定,自然界中最好的連續跳躍者是叢猴,或稱嬰猴,一種非洲本土的夜行性靈長類動物。叢猴的敏捷性指標是任何當代跳躍機器人的兩倍。《科學機器人》雜誌最近一期詳細介紹了這些結果。
叢猴的腿和肌肉經過最佳化,可以蹲伏,這種姿勢有助於它將勢能儲存在肌腱中。霍爾丹將這些物理原理轉化為製造了一款名為 Salto 的機器人。它僅重 100 克(大約相當於一塊肥皂的質量),垂直跳躍高度為一米。但更值得注意的是,它可以從地板跳到牆上的目標,並平均再反彈 1.21 米的高度。霍爾丹說,新的跳躍系統的力學原理可以應用於任何機器人。這意味著,我們的機械朋友在不久的將來就能跳過高樓大廈,至少可以連續跳躍。
關於支援科學新聞
如果您喜歡這篇文章,請考慮透過以下方式支援我們屢獲殊榮的新聞報道: 訂閱。透過購買訂閱,您將幫助確保有關當今塑造我們世界的發現和想法的具有影響力的故事的未來。
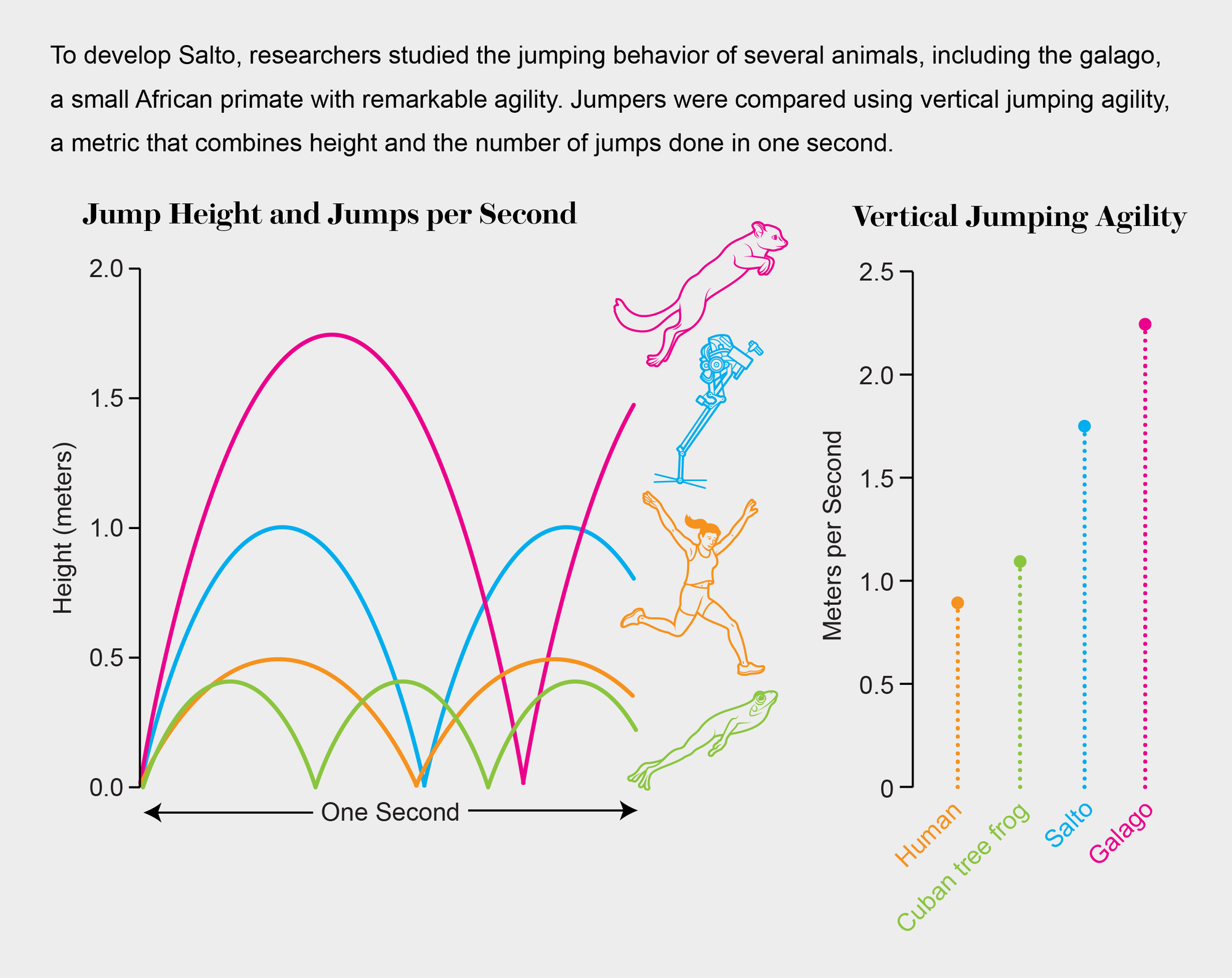
來源:Brown Bird Design(圖);Amanda Montañez(圖表);來源:“透過串聯彈性功率調製實現的機器人垂直跳躍敏捷性”,作者:Duncan W. Haldane 等人,《科學機器人》,第 1 卷,第 1 期,文章編號 EAAG2048;2016 年 12 月 6 日。