現在,一種雙足機器人可以邁出最好的一步,以腳跟到腳趾的運動方式行走,這種方式比扁平足機器人更接近人類的運動方式。
佐治亞理工學院機器人技術博士後研究員、幫助 DURUS 找到立足點的研究人員之一 Christian Hubicki 表示,DURUS 機器人透過腳跟向前滾動“腳”,並在腳趾處蹬離地面,從而緊密模仿人類的行走動作,使其更節能,更擅長在不平坦的地形上導航。
Hubicki 告訴 Live Science:“增強的行走能力可以幫助機器人在人類活動的環境中導航,並可以提高為災難響應而建立的機器人的效能。[奔跑中的機器人!5 個真正能動的機器人]
關於支援科學新聞
如果您喜歡這篇文章,請考慮透過以下方式支援我們屢獲殊榮的新聞報道 訂閱。透過購買訂閱,您正在幫助確保未來能夠繼續講述關於塑造我們當今世界的發現和思想的具有影響力的故事。
人形機器人 DURUS 由研究性非營利組織 SRI International 和佐治亞理工學院的高階機械雙足實驗機器人 (AMBER) 實驗室合作設計。早期 DURUS 設計經過修改,以適應新的行走方式,這得益於一種新穎的數學演算法,該演算法可以逐步調整機器人的動量和平衡。
裝備精良
Hubicki 告訴 Live Science,雙足行走的機器人通常具有“腳”,這些“腳”又大又平,以提供更穩定的平臺。
Hubicki 說:“更大的腳意味著更大的支撐多邊形,並且更難摔倒。”
控制機器人前進動量的演算法通常在蹬離時保持這些大腳平放在地面上,以最大限度地降低機器人傾倒的風險。
Hubicki 說:“一旦你傾斜到邊緣,你就好像一個鐘擺——在一個可以向前或向後倒的樞軸點上。”
但是,雖然扁平足步行者可能在跑步機上表現良好,但現實世界中無法容納扁平足的不平坦地形可能會使演算法感到困惑,並阻止機器人前進。
AMBER 實驗室的研究人員介入了,他們設計了一種新的演算法,即使只有部分腳部接觸地面,也能使機器人保持直立並向前移動。Hubicki 和他的同事使用帶有足弓的改良腳測試了 DURUS;根據 Hubicki 的說法,每一步都從腳跟接觸地面開始——“腳跟撞擊”,然後滾動到腳掌以蹬離地面。安裝在機器人腳踝處的彈簧就像肌腱一樣,儲存腳跟撞擊的能量,以便稍後釋放,作為提升力。
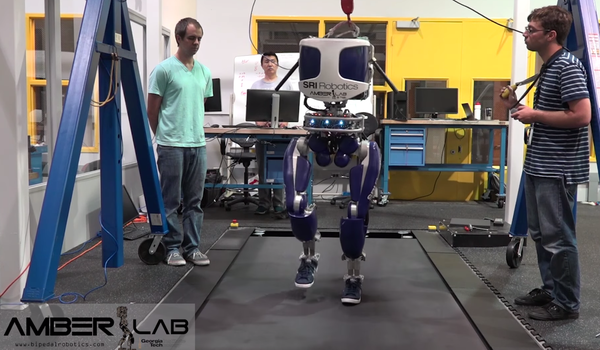
7 月 12 日,AMBER 實驗室在 YouTube 上釋出了一段 DURUS 自信邁步的影片。DURUS 的新腳與人腳大小相近——大約是原始型號腳長度的一半。為了強調這種相似性,該團隊給它們穿上了一雙運動鞋。
Hubicki 說:“我們想表明,我們的演算法可以讓它用人類大小的腳行走。還有什麼比給它穿上鞋子更好的方法呢?”
Hubicki 補充說,該演算法甚至可能在機器人技術之外有應用,他建議該演算法可用於改進假肢和外骨骼的設計,以幫助需要輔助工具的人四處走動。
版權所有 2016 年 LiveScience,Purch 公司。保留所有權利。未經許可,不得釋出、廣播、改寫或重新分發此材料。