一款新型變形龜形機器人可以探索陸地與海洋交匯處的危險區域,並可能引領未來的機器在複雜的現實世界條件下航行。
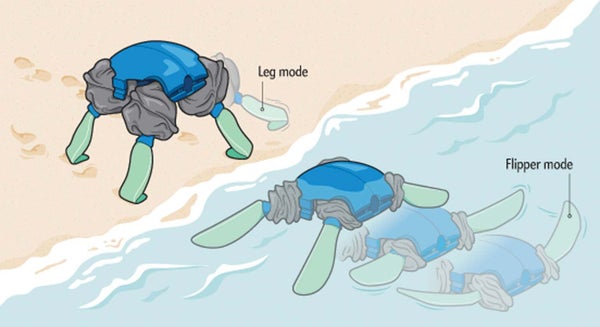
兩棲機器人龜 (ART) 結合了海洋游泳海龜和陸地行走陸龜的最佳移動性特徵,最近在《自然》雜誌上描述了該機器人,它可以將其肢體從類似海龜的鰭狀肢變形為類似陸龜的腿。“大多數兩棲機器人……在每種環境中使用專用的推進系統,”耶魯大學機器人專家麗貝卡·克萊默-博蒂格里奧說,她是該論文的資深作者。“我們的系統為兩種環境調整了單一的統一推進機制:它有四個肢體,這些肢體可以在水生運動的鰭狀肢狀態和陸地運動的腿狀肢狀態之間轉換。”
每個變形肢體都由複合聚合物材料包圍,這種材料在加熱時是可塑的,冷卻時是堅硬的。為了改變肢體的形狀,內建的銅加熱器會加熱並軟化外層材料。然後,下面的軟體機器人“肌肉”會膨脹或收縮,將扁平的鰭狀肢轉變為圓形的腿狀肢,反之亦然。最後,聚合物冷卻並在新的形狀周圍硬化,這個過程需要一到兩分鐘。軟體機器人肢體連線到更傳統的“硬”機器人肩關節,肩關節包含三個電子馬達,因此 ART 可以在陸地上“爬行”或“蠕動”,也可以在水中“划槳”或“拍打”。這些關節連線到模組化底盤,密封的 PVC 管保護機器人的電子元件免受水的侵害。3D 列印的“外殼”為機器人提供了流線型形狀和一個可以容納空氣或壓載物以調節浮力的空間。
支援科學新聞報道
如果您喜歡這篇文章,請考慮透過以下方式支援我們屢獲殊榮的新聞報道 訂閱。透過購買訂閱,您正在幫助確保有關塑造我們當今世界的發現和想法的具有影響力的故事的未來。
奧斯陸都市大學的機器人專家 Tønnes Nygaard 說,整合軟體機器人和傳統機器人技術賦予了 ART 變形能力,他沒有參與這項新研究。“當您使用傳統的機器人技術時,非常嚴格、剛性的運動模式是必要的,”他補充道。“但現在藉助來自軟體機器人的這些技術,您或許能夠做一些更流暢的事情。”
這種自適應技術最終可能幫助機器人在現實世界中發現的許多不同表面和環境中跋涉,而無需攜帶額外的推進系統,這可能會降低它們的移動效率。克萊默-博蒂格里奧的團隊發現,ART 使用的能量與僅為一種環境製造的機器人大致相同。
這款機器人陸龜尚未到達終點線:目前的原型仍然需要繫繩來提供電力和通訊,並且它的動作緩慢而笨拙。但研究人員正在努力改進這些問題。“我很高興看到他們已經取得了多大的進步,”Nygaard 說。“我非常有興趣看到這個團隊在幾年內會取得什麼成果。”