每次看到這一幕我都起雞皮疙瘩。一位癱瘓的志願者坐在輪椅上,僅憑思想就能控制電腦或機械肢體——這是腦機介面 (BMI) 實際應用的演示。
這發生在我2013年的實驗室裡,當時埃裡克·索托(Erik Sorto)在21歲時因槍傷而癱瘓,十多年來第一次僅憑思想就無需幫助地喝到啤酒。腦機介面從高階皮層區域傳送神經資訊。然後,一個機電附件能夠伸出手抓住瓶子,將其舉到索托的嘴唇邊,然後他喝了一口。在他接受腦部電極植入手術一年後,他喝到了這口啤酒,該手術旨在控制支配觸發運動的想法的訊號。我和我的實驗室同事驚奇地看著他完成了這項看似簡單,但實際上卻非常複雜的任務。
目睹如此壯舉立即引發了一個問題:僅僅是思想如何控制機械假肢?我們每天不假思索地移動四肢——輕鬆完成這些動作是任何先進腦機介面的目標。然而,神經科學家們幾十年來一直試圖解碼啟動伸出手去抓取物體的運動的神經訊號。讀取這些訊號的有限成功促使人們尋找新的方法來利用大腦 860 億個神經元交流時產生的嘈雜電活動。新一代腦機介面現在有望透過非常精確地利用制定動作的神經區域(無論是想要抓住杯子還是邁出一步)來在大腦和假肢之間建立無縫連線。
支援科學新聞事業
如果您喜歡這篇文章,請考慮透過以下方式支援我們屢獲殊榮的新聞事業: 訂閱。透過購買訂閱,您將幫助確保未來繼續講述關於發現和塑造當今世界的想法的具有影響力的故事。
從大腦到機器人
腦機介面透過向大腦傳送和接收——“寫入”和“讀取”——訊息來運作。介面技術主要分為兩大類。“寫入式”腦機介面通常使用電刺激將訊號傳輸到神經組織。這項技術的成功臨床應用已投入使用。耳蝸假體刺激聽覺神經,使失聰受試者能夠聽到聲音。控制運動活動的區域——基底神經節的深部腦刺激,可治療帕金森病和特發性震顫等運動障礙。刺激視網膜的裝置目前正在臨床試驗中,以減輕某些形式的失明。
相比之下,“讀出式”腦機介面記錄神經活動,仍處於發展階段。在下一代技術應用於患者之前,需要解決讀取神經訊號的獨特挑戰。粗略的讀出技術已經存在。腦電圖 (EEG) 記錄釐米級腦組織上的平均活動,捕獲數百萬神經元的活動,而不是單個迴路中單個神經元的活動。功能性磁共振成像 (fMRI) 是一種間接測量方法,記錄流向活躍區域的血流量增加。它可以比腦電圖成像更小的區域,但其解析度仍然相當低。血流量變化緩慢,因此功能性磁共振成像無法區分大腦活動的快速變化。
為了克服這些限制,理想情況下,人們希望記錄單個神經元的活動。觀察大量單個神經元的放電率變化可以最完整地瞭解特定大腦區域正在發生的事情。近年來,植入大腦的微小電極陣列已開始使這種型別的記錄成為可能。目前使用的陣列是四乘四毫米的平面,帶有 100 個電極。每個電極長一到 1.5 毫米,從平面突出。整個陣列類似於釘床,可以記錄 100 到 200 個神經元的活動。
這些電極記錄的訊號會傳遞到“解碼器”,解碼器使用數學演算法將單個神經元放電的各種模式轉換為啟動特定運動的訊號,例如控制機械肢體或計算機。這些讀出式腦機介面將幫助因脊髓損傷、中風、多發性硬化症、肌萎縮側索硬化症和杜氏肌營養不良症而遭受腦損傷的患者。
我們的實驗室專注於四肢癱瘓患者,他們因上脊髓損傷而無法移動上肢或下肢。我們從大腦皮層記錄,大腦皮層是大腦兩個大半球約三毫米厚的表面。如果展開,每個半球的皮層將測量約 80,000 平方毫米。隨著收集到更多資料,專門控制特定大腦功能的皮層區域的數量不斷增加,現在估計已超過 180 個區域。這些位置處理感覺資訊,與其他參與認知的腦區進行交流,做出決定或傳送命令以觸發動作。
簡而言之,腦機介面可以與皮層的許多區域互動。其中包括初級皮層區域,它們檢測感覺輸入,例如照射到視網膜上的光線的角度和強度或外周神經末梢觸發的感覺。目標還包括初級區域之間密集連線的聯合皮層,這些初級區域專門用於語言、物體識別、情感和決策的執行控制。
少數幾個研究小組已經開始記錄癱瘓患者的單個神經元群體,使他們能夠在受控的實驗室環境中操作假肢。在患者能夠像心臟起搏器一樣容易地配備神經假體裝置之前,仍然存在重大障礙。我的團隊正在追求從聯合區域而不是其他實驗室針對的運動皮層進行記錄。我們希望這樣做可以在感知傳達意圖的神經訊號的放電方面提供更高的速度和通用性。
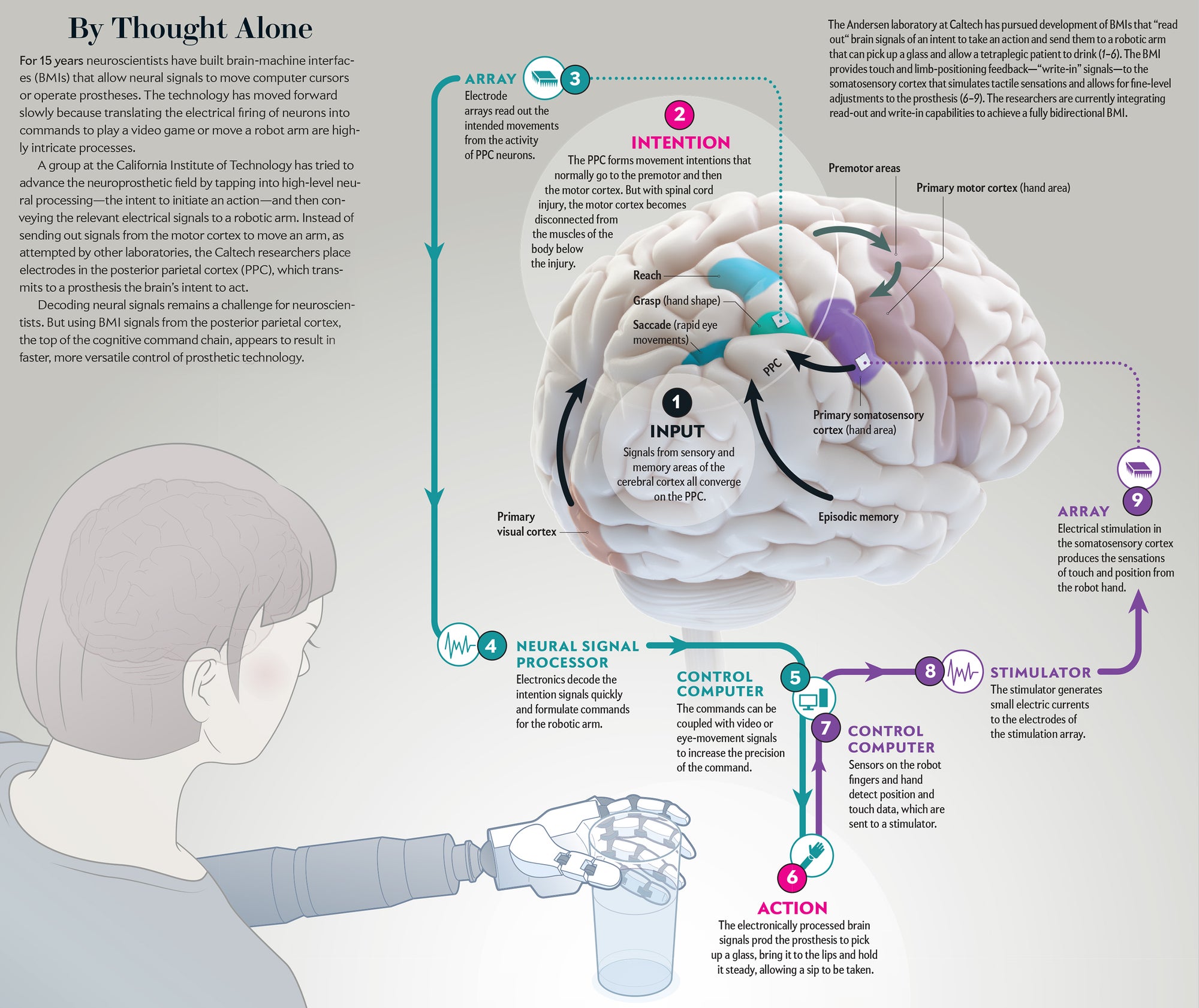
我的實驗室研究的具體聯合區域是後頂葉皮層 (PPC),它是啟動運動計劃的起始區域。在我們對非人靈長類動物的研究中,我們發現 PPC 的一個子區域,稱為外側頂內皮層,可以辨別開始眼球運動的意圖。肢體運動處理發生在 PPC 的其他區域。頂葉到達區準備手臂運動。此外,當時在日本大學醫學院的坂田秀夫 (Hideo Sakata) 及其同事發現,前頂內區制定抓握運動。
來自非人靈長類動物的記錄表明,PPC 為大腦控制機器人或計算機游標提供了幾個可能的優勢。它控制雙臂,而每個半球的運動皮層(其他實驗室針對的區域)主要啟用身體對側的肢體。PPC 還指示運動的目標。例如,當非人靈長類動物在視覺提示下伸手去拿物體時,這個大腦區域會立即啟動,標記所需物體的位置。相比之下,運動皮層會發送訊號,指示伸展運動應採取的路徑。瞭解預期運動動作的目標可以讓腦機介面在幾百毫秒內快速解碼,而從運動皮層中找出軌跡訊號可能需要一秒以上。

由加州理工學院的 Richard Andersen(左)及其團隊開發的介面技術使埃裡克·索托(Erik Sorto)(右)能夠移動機械臂。圖片來源:Lance Hayashida 和加州理工學院
從實驗室到患者
從實驗室動物實驗到人類 PPC 研究並非易事。在我們進行首次人體植入之前,已經過去了十五年。首先,我們將計劃用於人體的相同電極陣列插入健康的非人靈長類動物體內。然後,猴子學會了控制計算機游標或機械肢體。
我們組建了一支由來自加州理工學院、南加州大學、加州大學洛杉磯分校、蘭喬洛斯阿米戈斯國家康復中心以及卡薩科利納醫院和醫療中心的科學家、臨床醫生和康復專業人員組成的團隊。該團隊獲得了食品和藥物管理局以及機構審查委員會的批准,這些機構負責評估相關實驗室、醫院和康復診所中程式的安全性和倫理道德。
這種專案中的志願者是真正的先驅,因為他們可能受益,也可能不會受益。參與者最終加入是為了幫助那些一旦技術完善並用於日常使用就會尋求該技術的使用者。我們第一位志願者索托的植入手術於 2013 年 4 月進行,由神經外科醫生查爾斯·劉 (Charles Liu) 和布萊恩·李 (Brian Lee) 實施。手術進行得天衣無縫,但隨後是等待癒合才能測試裝置。
我在 NASA 噴氣推進實驗室的同事們曾建造併發射了火星探測器,他們談到探測器進入行星大氣層到著陸之前的七分鐘恐怖時刻。對我來說,這是兩週的忐忑不安,想知道植入物是否會起作用。我們知道非人靈長類動物大腦的相似區域是如何運作的,但人體植入是在測試未知的領域。以前沒有人嘗試過從人類 PPC 神經元群體中記錄資料。
在測試的第一天,我們檢測到了神經活動,到本週末,有足夠神經元的訊號開始確定索托是否可以控制機械肢體。當索托想象旋轉他的手時,一些神經元的活動發生了變化。他的第一個任務包括將機械手轉向不同的方向,與一名研究生握手。他和我們一樣激動,因為這項成就標誌著他受傷後第一次可以使用機械臂的身體運動與世界互動。
人們經常問學習使用腦機介面需要多長時間。事實上,這項技術開箱即用。使用大腦的意圖訊號來控制機械臂是直觀且容易的。透過想象不同的動作,索托可以觀看來自他皮層的單個神經元的記錄,並隨意開啟和關閉它們。
我們在研究開始時詢問參與者,他們希望透過控制機器人實現什麼目標。對於索托來說,他希望能夠自己喝啤酒,而不是尋求別人的幫助。他在研究開始大約一年後就掌握了這項技能。在加州理工學院研究科學家斯賓塞·凱利斯 (Spencer Kellis) 共同領導的團隊(其中包括來自約翰·霍普金斯大學應用物理實驗室的機器人專家)的合作下,我們將索托的意圖訊號與機器視覺和智慧機器人技術提供的處理能力相結合。
視覺演算法分析來自攝像機的輸入,智慧機器人將意圖訊號與計算機演算法相結合,以啟動機械臂的運動。經過一年的時間,索托實現了這一目標,現場每個人都歡呼雀躍。2015 年,我們在《科學》雜誌上發表了我們關於使用來自 PPC 的意圖訊號來控制神經假體的首批成果。
索托不是我們技術的唯一使用者。南希·史密斯 (Nancy Smith) 現在是該研究的第四年參與者,大約 10 年前因車禍導致四肢癱瘓。她曾是一名高中計算機圖形學教師,並以彈鋼琴為消遣。在我們與加州理工學院的泰森·阿夫拉洛 (Tyson Aflalo) 和加州大學洛杉磯分校的納德·普拉蒂安 (Nader Pouratian) 等主要團隊成員的研究中,我們發現史密斯的 PPC 中詳細地表示了雙手各個手指。透過使用虛擬現實,她可以在計算機螢幕上顯示的左右“虛擬化身”手上分別想象和移動 10 個手指。透過使用一隻手五個手指的想象運動,史密斯可以在計算機生成的鋼琴鍵盤上演奏簡單的旋律。
圖片來源:AXS 生物醫學動畫工作室
大腦如何表示目標
我們很高興與這些患者合作,找到調整為處理與個人意圖相關的訊號的神經元。從僅僅幾百個神經元中收集到的資訊量之大令人震驚。我們可以解碼一系列認知活動,包括心理策略(想象的運動與嘗試的運動)、手指運動、關於回憶視覺刺激的決策、抓握的手勢、觀察到的動作、諸如“抓握”或“推動”之類的動作動詞以及視覺和體感知覺。令我們驚訝的是,插入幾個微小的電極陣列使我們能夠解碼一個人打算做的很多事情,以及導致意圖形成的感覺輸入。
從一小塊腦組織中可以記錄多少資訊這個問題讓我想起了我職業生涯早期遇到的一個類似的科學問題。在我在約翰·霍普金斯大學醫學院已故的弗農·芒特卡斯爾 (Vernon Mountcastle) 的指導下進行博士後培訓期間,我們研究了猴子的 PPC 中如何表示視覺空間。我們的眼睛就像照相機,感光視網膜會發出成像在其上的視覺刺激的位置訊號——整個影像被稱為視網膜地形圖。神經元對視網膜的有限區域做出反應,這些區域被稱為它們的感受野。在其他方面,處理視覺感知與攝像機記錄不同。當攝像機移動時,記錄的影像也會移動,但是當我們移動眼睛時,世界看起來是穩定的。來自眼睛的視網膜地形影像必須轉換為視覺空間表示,該表示考慮到眼睛正在看的位置,以便當眼睛移動時,世界不會顯得像在滑動。
PPC 是高階視覺空間表示的關鍵處理中心。為了讓人伸手抓住物體,大腦需要考慮到眼睛正在看的位置才能將其拾起。人類的 PPC 病變會導致不準確的伸手動作。在芒特卡斯爾的實驗室裡,我們發現單個 PPC 神經元具有感受野,可以記錄場景的一部分。相同的細胞也攜帶眼位資訊。這兩個訊號透過將視覺反應乘以眼睛在頭部的位置相互作用——其乘積稱為增益場。
當我在加州大學聖地亞哥分校街對面的索爾克生物研究所獲得我的第一個教職時,我繼續研究理解大腦空間表示的問題。與開發神經網路的加州大學聖地亞哥分校理論神經科學家大衛·齊普瑟 (David Zipser) 合作,我們在《自然》雜誌上報道了一個神經網路的計算模型,該模型將視網膜地形位置與注視方向相結合,以製作對眼球運動不變的空間圖。在神經網路的訓練過程中,它們中間層形成了增益場,正如 PPC 實驗中的情況一樣。透過在同一神經元內混合視覺輸入和眼位訊號,只需九個神經元就可以表示整個視野。
最近,混合表示(對多個變數做出反應的神經元群體,如增益場)的想法再次引起關注。例如,來自前額葉皮層的記錄顯示,兩種型別的記憶任務和不同的視覺物件混合在一起。
此外,這項工作可能與解釋 PPC 中正在發生的事情有直接關係。當我們要求史密斯使用一套書面說明執行一項任務的八種不同組合時,我們發現了這一點。她的其中一項任務需要制定策略來想象或嘗試一個動作。另一項任務需要使用身體的右側和左側;第三項任務需要擠壓手或聳肩。我們發現 PPC 神經元混合了所有這些變數——並且這種混合表現出特定的模式,這與我們和其他人在實驗室動物實驗中報告的隨機相互作用不同。
用於制定策略和控制身體每一側的神經元群體的活動趨於重疊。如果一個神經元放電以啟動左手的運動,它很可能也會對嘗試的右手運動做出反應,而控制肩部和手的神經元組則更加分離。我們將這種型別的表示稱為部分混合選擇性。此後,我們發現部分混合表示中存在相似之處,這些相似之處似乎構成了運動的語義。針對相同動作型別的細胞活動趨於重疊。當一個人閱讀“grasp”這個詞時,對一個人抓取物體的影片做出反應的神經元也很可能會變得活躍。但是,對諸如推動之類的動作做出反應的細胞傾向於被分離成它們自己的組。總的來說,部分混合編碼似乎是相似計算的基礎(左手的運動類似於右手的運動)。它還將表現出不同形式神經處理的那些(肩部的運動與手的運動不同)分開。
在聯合皮層的某些部分發現了混合和部分混合編碼——新的研究必須探索它們是否出現在控制語言、物體識別和執行控制的其他位置。此外,我們想知道初級感覺或運動皮層區域是否使用類似的部分混合結構。
目前的研究表明,至少在體感皮層中,神經元不對視覺刺激或做出運動的意圖做出反應,但確實對體感刺激和運動的想象執行做出反應。因此,有直接證據表明,在人類 PPC 中看到的變數在初級體感皮層中沒有發現,儘管部分混合選擇性可能在兩個區域都存在,但變數集不同。
另一個近期目標是找出學習新任務能在多大程度上影響使用假肢的志願者的表現。如果學習很容易發生,那麼大腦的任何區域都可能被植入並接受任何可想象的腦機介面任務的訓練。例如,植入初級視覺皮層的植入物可以學習控制運動任務。但是,如果學習受到更多限制,則需要在運動區域植入植入物才能執行運動任務。早期結果表明後一種可能性,並且植入物可能必須放置在先前已被確定為控制特定神經功能的區域。
寫入感覺
腦機介面不僅必須接收和處理大腦訊號,還必須將來自假肢的反饋傳送到大腦。當我們伸手去拿物體時,視覺反饋有助於引導手指向目標。手的定位取決於要抓取的物體的形狀。如果手在開始操作物體後沒有收到觸控和肢體定位訊號,效能會迅速下降。
找到糾正這種缺陷的方法對於我們脊髓損傷的志願者至關重要,他們無法移動受傷部位以下的身體。他們也無法感知對其流暢運動至關重要的觸覺或身體定位。那麼,理想的神經假體必須透過雙向訊號傳遞來補償:它必須傳輸志願者的意圖,但也必須檢測來自機械肢體感測器的觸控和定位資訊。
匹茲堡大學的羅伯特·高恩特 (Robert Gaunt) 和他的同事透過在四肢癱瘓患者的體感皮層(肢體輸入處理觸控感覺的地方)中植入微電極陣列來解決這個問題。高恩特的實驗室透過微電極傳送微小電流,受試者報告了來自手錶面部分的感覺。
我們還在體感皮層的手臂區域使用了類似的植入物。令我們驚喜的是,我們的受試者 FG 報告了自然的感覺,例如皮膚上的擠壓、敲擊和振動,這被稱為皮膚感覺。他還感知到肢體正在移動的感覺——一種稱為本體感覺的感覺。這些實驗表明,肢體感覺喪失的受試者可以透過具有寫入式感知的腦機介面重新獲得感覺。下一步是提供豐富的體感反饋感覺,以提高大腦控制下機器人的手動靈活性。為了實現這一目標,匹茲堡小組最近表明,與僅標準的視覺反饋相比,刺激初級體感皮層可以縮短用機械臂抓住物體的時間。此外,我們想知道受試者是否能檢測到“具身化”的感覺,即機械肢體似乎成為他們身體的一部分。
正如這些臨床研究向我們展示的那樣,寫入和讀出皮層訊號都提供了對神經損傷後大腦皮層重組程度的深入瞭解。大量研究報告了高度的重組,但直到最近,人們才很少關注仍然完好的基本結構。腦機介面研究表明,四肢癱瘓受試者可以快速使用運動皮層和 PPC 皮層來控制輔助裝置,並且刺激體感皮層會在去神經支配區域產生感覺,這與完整個體預期的感覺相似。這些結果表明,即使在嚴重損傷後以及儘管存在損傷引起的塑性,成人皮層也具有相當大的穩定性。
未來挑戰
未來的一個主要挑戰是開發更好的電極,用於傳送和接收神經訊號。我們發現,目前的植入物可以持續工作相對較長的五年時間。但是,更好的電極理想情況下會進一步延長這些系統的壽命,並增加可以從中記錄的神經元數量。另一個優先事項——增加電極微小尖峰的長度——將有助於訪問位於皮層褶皺內的區域。
柔性電極會隨著大腦的輕微晃動(來自血壓變化或日常呼吸週期)而移動,這也將允許更穩定的記錄。由於硬質電極每天相對於神經元的位置都會發生變化,因此現有電極需要重新校準解碼器;研究人員最終希望在數週和數月內跟蹤相同神經元的活動。
植入物需要小型化,以低功率執行(以避免大腦發熱),並以無線方式執行,因此無需電纜將裝置連線到腦組織。所有當前的腦機介面技術都需要透過外科手術植入。但是,我們希望有一天能夠開發出記錄和刺激介面,這些介面能夠以侵入性更小但精度更高的方式接收和傳送訊號。朝著這個方向邁出的一步是我們最近在非人靈長類動物中發現的,即超聲波記錄的與神經活動相關的血容量變化可用於腦機介面。由於顱骨阻礙超聲波,因此仍然需要一個小型的超聲波透明視窗來替換一小塊顱骨,但這種手術的侵入性遠小於植入微電極陣列,後者需要開啟硬腦膜(包圍和保護大腦的堅韌層)並將電極直接插入皮層。
當然,腦機介面旨在幫助癱瘓人士。然而,科幻小說、電影和媒體都關注將這項技術用於增強,賦予“超人”能力,這可能使人反應更快(這對於許多運動任務來說當然是一個優勢),或者直接從皮層傳送和接收資訊,很像在大腦中植入了一部小型手機。但增強功能仍然主要屬於科幻小說範疇,只有當開發出能夠以或接近當前微電極陣列技術精度執行的非侵入性技術時才能實現。
最後,我想表達進行基礎研究並將其提供給患者的滿足感。基礎科學對於推進知識和開發醫療療法都是必要的。然後能夠將這些發現轉化為臨床環境,使研究工作最終得以實現。當科學家與患者分享他們能夠移動機械肢體再次與物理世界互動時的喜悅時,科學家會感到一種不可否認的個人成就感。