在2015年科幻電影《超能查派》中,虛構的工程師迪昂想要創造一臺可以思考和感受的機器。為此,他編寫了一個可以像孩子一樣學習的人工智慧程式。迪昂的測試物件查派最初的精神狀態相對空白。透過簡單地觀察和試驗周圍環境,他獲得了通用知識、語言和複雜技能——即使是我們今天擁有的最先進的人工智慧系統也無法完成這項任務。
可以肯定的是,某些機器在特定任務方面已經超越了人類的能力,例如玩《危險邊緣!》、《國際象棋》和中國圍棋等遊戲。2017年10月,英國公司DeepMind推出了AlphaGo Zero,這是其人工智慧圍棋系統的最新版本。與透過挖掘大量人類對弈遊戲來掌握圍棋的前身AlphaGo不同,這個版本透過與自己對弈來自主積累經驗。儘管AlphaGo Zero取得了非凡的成就,但它僅限於學習具有明確規則的遊戲——並且需要下數百萬次棋才能獲得其超人般的技能。
相比之下,我們的後代從嬰兒早期就開始透過探索周圍環境和試驗運動和語言來發展。他們自己收集資料,適應新情況,並在不同領域之間轉移專業知識。
關於支援科學新聞報道
如果您喜歡這篇文章,請考慮透過以下方式支援我們屢獲殊榮的新聞報道 訂閱。透過購買訂閱,您正在幫助確保有關塑造我們當今世界的發現和思想的具有影響力的故事的未來。
自21世紀初以來,機器人專家、神經科學家和心理學家一直在探索構建模仿這種自發性發展的機器的方法。他們的合作成果是能夠移動物體、獲得基本詞彙和數字能力,甚至表現出社交行為的機器人。與此同時,這些人工智慧系統正在幫助心理學家瞭解嬰兒是如何學習的。
預測機器
我們的大腦不斷嘗試預測未來——並更新其期望以符合現實。假設您第一次遇到鄰居的貓。瞭解您自己愛嬉戲的小狗,您期望這隻貓也會喜歡您的愛撫。但是,當您伸手去撫摸這個生物時,它抓傷了您。您更新了您關於可愛動物的理論——或許推測,如果您給它帶些零食,這隻小貓會更友好。手裡拿著好吃的東西,貓確實讓您撫摸它而沒有造成傷害。下次您遇到毛茸茸的貓科動物時,您會在嘗試觸控它之前先給它一塊金槍魚小零食。
透過這種方式,大腦中較高Processing Center不斷根據來自感覺器官的訊號完善其內部模型。以我們高度複雜的視覺系統為例。眼睛中的神經細胞在將此資訊傳輸到更高層次的區域(解釋場景的整體含義)之前,先處理影像的基本特徵。有趣的是,神經連線也以相反的方向執行:從高層次的Processing Center(例如頂葉或顳葉皮層的區域)到低層次的Processing Center(例如初級視覺皮層和外側膝狀核[見下圖])。一些神經科學家認為,這些“向下”連線將大腦的預測傳遞到較低層次,從而影響我們所看到的東西。
至關重要的是,來自大腦較高層次的向下訊號不斷與來自感官的“向上”訊號相互作用,從而產生預測誤差:我們期望的和我們經歷的之間的差異。傳達這種差異的訊號返回到較高層次,幫助完善內部模型併產生新的猜測,形成一個永無止境的迴圈。“預測誤差訊號驅動系統朝著估計真實存在的事物方向發展,”華盛頓大學的計算神經科學家拉傑什·P·N·拉奧說。
當拉奧還是羅切斯特大學的博士生時,他和他的導師,現在在德克薩斯大學奧斯汀分校的計算神經科學家達納·H·巴拉德,成為第一個在人工神經網路中測試這種預測編碼的人。(神經網路是一種模仿人腦的計算機演算法,它逐步調整內部引數以從給定的輸入生成所需的輸出。)在這項於1999年在《自然神經科學》雜誌上發表的計算實驗中,研究人員模擬了視覺皮層中的神經元連線——包括攜帶預測的向下連線和從外部世界帶來感覺訊號的向上連線。在使用自然圖片訓練網路後,他們發現它可以學習識別影像的關鍵特徵,例如斑馬的條紋。
用手指計數
我們與許多當今人工智慧系統之間的根本區別在於,我們擁有可以用來在世界各地移動和行動的身體。嬰兒和幼兒透過測試他們的胳膊、腿、手指和腳趾的運動並檢查觸手可及的一切事物來發展。他們自主學習如何走路、說話以及識別物體和人。年輕人如何在很少指導的情況下完成所有這些事情,是發育心理學家和機器人專家研究的關鍵領域。他們的合作正在為這兩個領域帶來令人驚訝的見解。
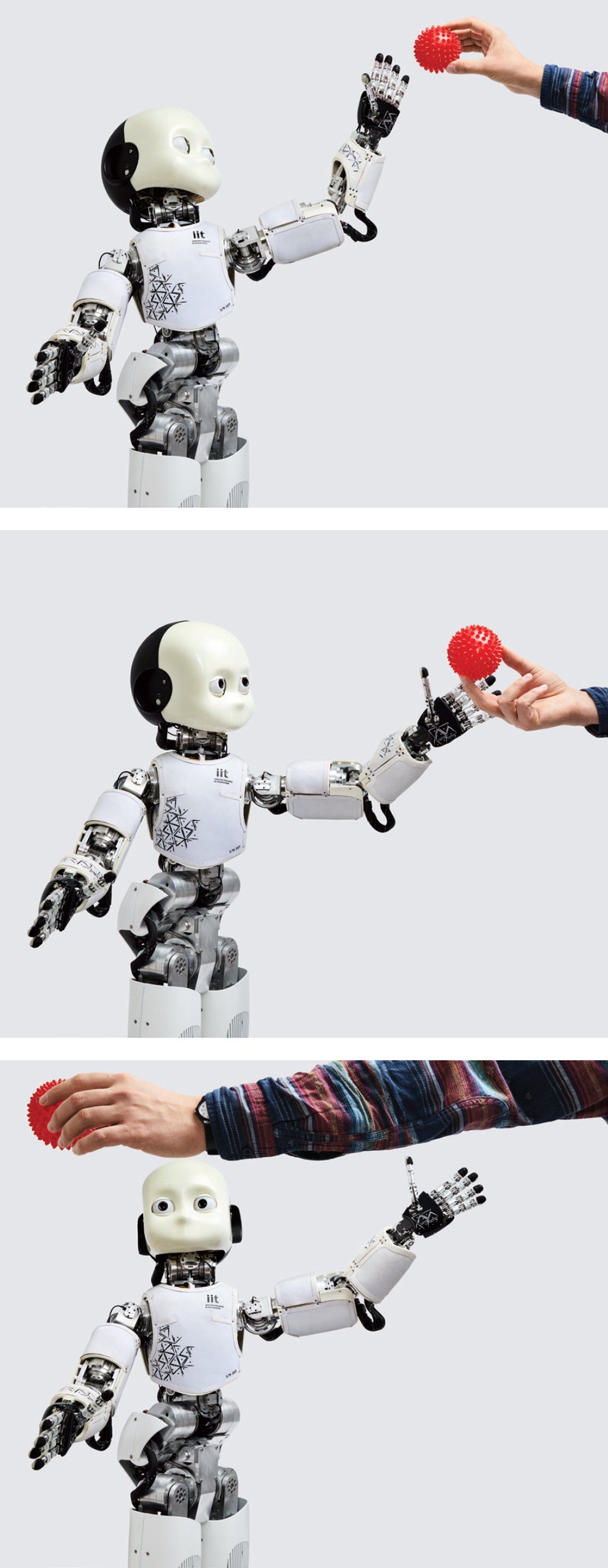
在英國普利茅斯大學研究的機器人iCub,如果實驗者在命名物體時始終將物體放置在同一位置,則可以更輕鬆地學習新單詞,例如“球”。
孫李
在20世紀90年代後期開始的一系列開創性實驗中,當時在索尼計算機科學實驗室的機器人專家谷口淳等人開發了一種基於預測的神經網路,用於學習基本動作,並測試了這些演算法在機器人中的工作效果。他們發現,這些機器可以獲得基本技能,例如導航簡單環境、模仿手部動作以及遵循基本的口頭命令,如“指”和“擊打”。
最近,英國普利茅斯大學的機器人專家安吉洛·坎傑洛西和印第安納大學布盧明頓分校的發育心理學家琳達·B·史密斯證明了身體對於獲取知識的重要性。“[機器人]身體的形狀以及它可以做的事情的種類,會影響它擁有的經驗以及它可以從中學習的內容,”史密斯說。科學家們的主要測試物件之一是iCub,這是一個由義大利理工學院的一個團隊出於研究目的而製造的三英尺高的人形機器人。它沒有預程式設計功能,允許科學家實施特定於其實驗的演算法。
在2015年的一項研究中,坎傑洛西、史密斯及其同事賦予iCub一個神經網路,使其能夠學習簡單的關聯,並發現當物體的名稱始終與特定的身體位置相關聯時,它更容易學習新單詞。實驗人員反覆將球或杯子放置在機器人的左側或右側,使其將物體與檢視物體所需的運動(例如傾斜頭部)聯絡起來。然後,他們將此動作與物品的名稱配對。如果相應的物體出現在一個特定位置而不是多個位置,則機器人能夠更好地學習這些基本單詞。
有趣的是,當研究人員用16個月大的幼兒重複實驗時,他們發現了類似的結果:將物體與特定的姿勢聯絡起來有助於幼兒學習單詞關聯。坎傑洛西的實驗室正在開發這項技術,以教授機器人更抽象的單詞,如“這”或“那”,這些單詞與特定事物無關。
使用身體還可以幫助兒童和機器人獲得基本的數字技能。例如,研究表明,在心理上難以表示手指的年輕人也往往算術能力較弱。在2014年的一項研究中,坎傑洛西及其團隊發現,當教機器人用手指計數時,它們的神經網路比僅使用數字名稱進行教學時更準確地表示數字。
好奇心引擎
新奇事物也有助於兒童學習。在2015年發表在《科學》雜誌上的一篇論文中,約翰·霍普金斯大學的研究人員報告說,當嬰兒遇到未知事物時,例如一個似乎穿過牆壁的固體物體,他們會探索他們違反的期望。用樸實的語言來說,他們內建的減少預測誤差的驅動力有助於他們的發展。
法國國家資訊與自動化研究所INRIA的機器人專家皮埃爾-伊夫·奧德耶認為,學習過程更為複雜。他認為,孩子們積極且出人意料地成熟地尋找環境中那些提供更多學習機會的物體。例如,幼兒可能會選擇玩玩具汽車而不是100片的拼圖遊戲——可以說是因為她的知識水平將使她能夠對前者產生更多可測試的假設。
為了驗證這一理論,奧德耶和他的同事賦予機器人系統一種他們稱之為內在動機的功能,其中預測誤差的減少會產生獎勵。(對於智慧機器來說,獎勵可以對應於它已被程式設計為透過其行動最大化的數值量。)這種機制使索尼AIBO機器人(一種小型、小狗狀的機器,具有基本的感覺和運動能力)能夠自主尋找具有最大學習潛力的任務。機器人小狗能夠獲得基本技能,例如抓握物體和與另一臺機器人進行口頭互動,而無需被程式設計為實現這些特定目標。奧德耶解釋說,這種結果是“機器人探索世界的副作用,其驅動力是提高其預測的動機。”
值得注意的是,即使機器人經歷了相似的訓練階段,機會也在它們學習的內容中發揮了作用。有些機器人探索得少一些,有些機器人探索得多一些——最終它們瞭解了不同的事物。奧德耶認為,這些不同的結果表明,即使具有相同的程式設計和相似的教育環境,機器人也可能獲得不同的技能水平——這很像典型的課堂中發生的情況。
最近,奧德耶的研究小組使用計算模擬表明,配備這些預測演算法(和適當硬體)的機器人聲帶也可以學習語言的基本要素。他現在正在與哥倫比亞大學的認知神經科學家傑奎琳·戈特利布合作,以調查這種預測驅動的內在動機是否也是人類好奇心神經生物學的基礎。他說,進一步探索這些模型可能有助於心理學家瞭解發育障礙和疾病兒童的大腦中發生了什麼。
利他主義機器人
研究人員發現,即使iCub沒有被程式設計為具有內在的社交能力,僅減少預測誤差的動機就足以使其表現出樂於助人的行為。例如,在教機器人推動玩具卡車後,它可能會觀察到實驗人員未能完成相同的動作。通常,它會將物體移動到正確的位置——只是為了增加卡車在給定位置的確定性。目前在日本國家資訊通訊技術研究所的永井認為,幼兒可能會以類似的方式發展。“嬰兒不需要有幫助他人的意願,”她認為:僅最小化預測誤差的動機就可以啟動基本的社交能力。

圖片來源:Mesa Schumacher(大腦)和Amanda Montañez(級聯圖)
預測處理也可能幫助科學家理解自閉症等發育障礙。根據永井的說法,某些自閉症患者可能對預測誤差更敏感,這使得傳入的感覺資訊不堪重負。這可以解釋他們對重複行為的吸引力,重複行為的結果是高度可預測的。
荷蘭拉德堡大學的認知心理學家哈羅德·貝克林認為,預測處理也可能有助於解釋注意力缺陷多動障礙患者的行為。根據這一理論,自閉症患者更喜歡保護自己免受未知事物的侵害,而那些難以集中注意力的人則永遠會被周圍環境中不可預測的刺激所吸引,貝克林解釋說。“有些人對世界敏感,探索世界,而另一些人對世界過於敏感,則會保護自己,”他建議。“在預測編碼框架中,您可以很好地模擬這兩種模式。”他的實驗室目前正在使用人類腦成像來檢驗這一假設。
永井希望透過進行“認知映象”研究來評估這一理論,在研究中,配備預測學習演算法的機器人將與人互動。當機器人和人使用肢體語言和麵部表情進行交流時,機器將調整其行為以匹配其夥伴——從而反映出人對可預測性的偏好。透過這種方式,實驗人員可以使用機器人來模擬人類認知——然後檢查其神經結構,以試圖破譯人類頭部內部正在發生的事情。“我們可以將我們的特徵外化到機器人中,以更好地瞭解我們自己,”永井說。
未來的機器人
對機器人兒童的研究因此幫助回答了心理學中的某些關鍵問題,包括預測處理的重要性以及身體在認知發展中的作用。“我們已經瞭解了大量關於複雜系統如何工作、身體的重要性以及[和]關於探索和預測等真正基本的事物,”史密斯說。
然而,能夠發展出類似人類智慧的機器人還遠未成為現實:查派仍然屬於科幻小說的範疇。首先,科學家需要克服技術障礙,例如大多數機器人的脆弱身體和有限的感覺能力。(軟機器人和機器人視覺等領域的進步可能有助於實現這一目標。)更具挑戰性的是大腦本身令人難以置信的複雜性。儘管在許多方面都在努力模擬大腦,但科學家們離製造出可以與大腦匹敵的機器還很遠。“我完全不同意那些說在10或20年內我們將擁有具有人類水平智慧的機器的人,”奧德耶說。“我認為這表明對人類智慧的複雜性存在深刻的誤解。”
此外,智慧不僅僅需要合適的機器和電路。大量的研究表明,照顧者對兒童的發展至關重要。“如果你問我機器人是否可以變得真正像人類,那麼我會問你是否有人可以像照顧孩子一樣照顧機器人,”谷口說。“如果有可能,那麼是的,我們也許能夠做到這一點,否則,期望機器人像真正的人類孩子一樣發展是不可能的。”
逐步積累知識的過程也可能是必不可少的。“發展是一個非常複雜的級聯絡統,”史密斯說。“今天發生的事情為[明天]奠定了基礎。”因此,她認為,如果不以某種方式整合貫穿一生的逐步學習過程,就可能無法構建人類水平的人工智慧。
理查德·費曼在去世前不久寫道:“我無法創造的東西,我不理解。”在谷口2016年的著作《探索機器人思維》中,他將他的概念顛倒過來,說:“我可以理解我能創造的東西。”他認為,理解人類思維的最佳方法是合成一個思維。
有一天,人類可能會成功創造出一個可以像孩子一樣探索、適應和發展的機器人,也許還配備了代理照顧者,以提供健康成長所需的愛和指導。與此同時,類兒童機器人將繼續為我們提供關於兒童如何學習的寶貴見解——並揭示當基本機制出錯時可能會發生什麼。