長期以來,對於派遣機器人探索太陽系以尋找生命跡象的最大詬病,一直是它們無法像人類那樣有效地做出直觀甚至富有創造力的決定。 人工智慧 (AI) 的最新進展有望很快縮小這一差距——這是一件好事,因為目前尚無派遣人員探索火星地下洞穴或在木衛二冰冷水域下尋找 熱液噴口 的近期計劃。在可預見的未來,這些任務很可能由近乎自主的探測車和潛艇來完成,即使與地球失聯數週甚至數月,它們也能承受惡劣條件並進行重要的科學實驗。
當 史蒂夫·錢恩 在 20 世紀 90 年代中期接管美國宇航局噴氣推進實驗室的 人工智慧 (AI) 小組 時,如此複雜的人工智慧似乎更像是科幻小說,而不是註定要在美國宇航局即將到來的 2020 年火星任務 中發揮關鍵作用的東西。錢恩有一個願景,即讓這項技術成為美國宇航局最重要任務中不可或缺的一部分。但 25 年前的人工智慧——演算法不那麼複雜,計算機速度也較慢——這項技術根本無法勝任這項任務。
不過,錢恩很有耐心。他的團隊的技術逐漸開始自動化繁瑣的任務,並改進長期以來依賴研究人員艱苦觀察的工作。例如,噴氣推進實驗室使用稱為決策樹的預測模型建立了天空影像編目和分析工具 (SKICAT, pdf)——並用它來幫助美國宇航局自動化分類在 第二次帕洛瑪天文臺巡天 中發現的天體,該巡天是在 20 世紀 80 年代早期進行的。一旦 SKICAT 被輸入足夠多的科學家正在尋找的影像,該軟體就能比人類在帕洛瑪山巡天中分類出更多微弱、低解析度的天體。
支援科學新聞報道
如果您喜歡這篇文章,請考慮透過以下方式支援我們屢獲殊榮的新聞報道 訂閱。透過購買訂閱,您正在幫助確保有關塑造我們當今世界的發現和想法的具有影響力的故事的未來。
經過多年的漸進式改進,當美國宇航局要求錢恩和他的團隊設計用於自動化 地球觀測 1 號
(EO-1) 衛星的軟體時,他們獲得了人工智慧的巨大成功。 美國宇航局於 2003 年將噴氣推進實驗室的自主科學飛行器實驗 (ASE) 軟體上傳到衛星上,在十多年裡,它幫助研究了洪水、火山爆發和其他自然現象。在 EO-1 於 3 月停用之前,ASE 軟體有時會收到來自其他衛星或地面感測器的關於火山爆發的警報,並自主提示 EO-1 捕獲影像——甚至在科學家意識到發生這種情況之前。
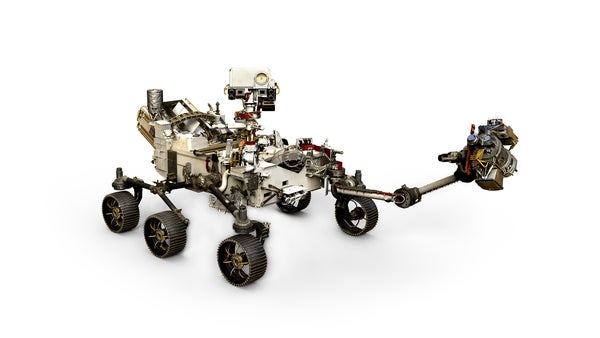
噴氣推進實驗室在 ASE 和其他專案上的工作讓美國宇航局確信,人工智慧可以在“火星 2020”任務中發揮重要作用。錢恩和他的團隊正在率先開發一種新型探測車,它比以往任何在火星紅色多岩石表面上漫遊的車輛都先進得多。 “火星 2020”探測器 在選擇自己的研究和實驗目標方面將擁有很大的自主權,因為它們要尋找生命曾經在地球最近的行星鄰居上存在的證據。
《大眾科學》 最近採訪了噴氣推進實驗室人工智慧小組的技術組主管兼實驗室任務規劃和執行部門的高階研究科學家錢恩。錢恩與《大眾科學》談到了太空旅行對人工智慧系統的要求、隨著人類探索越來越遠的區域對自主性的日益增長的需求,以及“終極”人工智慧太空任務會是什麼樣子。
[以下是對話的編輯稿]
控制 EO-1 衛星的 ASE 軟體對美國宇航局來說是如何成為人工智慧里程碑的?
這絕對是人工智慧的一個里程碑,不僅對噴氣推進實驗室和美國宇航局來說是這樣,對整個人工智慧界也是如此。這是因為 ASE 的巨大成功及其永續性。該軟體非常出色——它控制航天器超過 12 年。在此期間,它發出了大約 300 萬條指令,獲取了超過 60,000 次觀測,並且實際上實現了比人類操作航天器更高的可靠性。該軟體如此成功,以至於實際上使太空民主化。我們確實有一個網頁,世界各地的機構都可以在該網頁上提交請求,以直接指定航天器的任務。
美國宇航局願意將多少任務責任交給人工智慧?
我們在美國宇航局使用人工智慧面臨的挑戰之一是,由於我們處理的是太空任務,因此涉及大量費用,並且需要考慮較長的提前期。我們必須確保人工智慧始終表現良好——您收集到良好的科學資料,並且您保護了航天器。這並不意味著您可以準確預測它將要做什麼。您想要擺脫那種微觀管理的程度。您希望人工智慧更像科學家的學徒或助手一樣工作,而不是像機器一樣,因為機器必須進行微觀管理。有人擔心取代傑出的科學家,[但] 這還很遙遠,我們無需擔心。
您如何準備人工智慧來理解未知事物?
無監督學習對於分析未知事物至關重要。人類能夠做到的很大一部分是解釋不熟悉的資料。在美國宇航局,有很多類似的問題。您看到一些資料,並且 [這些資料] 的某些部分就是不匹配。想想劉易斯和克拉克探險隊探索西北領地。他們沒有每隔 10 英尺就繪製一張地圖,這正是我們目前對大多數探測器所做的事情。劉易斯和克拉克探險隊描述了山脈、河流和其他特徵——將它們置於背景中。我們希望人工智慧系統也能做同樣的事情。
為了開發這樣的系統,我們讓一位學生在一次跨國飛行中使用數碼相機拍攝影像。然後我們將不同的無監督學習方法應用於我們捕獲的資料。我們希望人工智慧 [自行] 學習存在山脈、森林和河流,並學習存在雲、白天、夜晚等等。但我們也希望人工智慧做好準備,當它感覺到某些不屬於任何一個類別的事物時感到驚訝。人工智慧再現了飛行覆蓋的不同型別區域的示例。透過這種方式,它提出了 10 或 12 個有意義的影像類別,並提供了這些類別的示例。這些類別與 [研究人員] 提出的類別相似——河流、森林、平原、山脈等等。傳送這些類別的示例以及哪個區域對應於每個類別的地圖是描述行星的更有效方式。
人工智慧將在即將到來的“火星 2020”探測器任務中發揮什麼作用?
該任務的人工智慧主要有三個領域。第一個是探測器的自主駕駛,這項技術可以追溯到“探路者”號,以及火星探測漫遊者 (MER) 計劃。自主駕駛就像一個刻度盤,您可以 [密切控制] 它並告訴探測器去哪裡,或者您只需告訴它們駕駛即可。在速度和安全性方面,每種方法都有不同的權衡。
人工智慧的第二個領域包括將幫助探測器進行科學研究的系統。目標定位能力將得到大大提高,並將應用於更多儀器——不僅僅是探測器的 SuperCam——這將提供成像、化學成分分析和礦物學分析。 SuperCam 是早期火星探測器上 ChemCam 的升級版,ChemCam 可以透過用雷射照射岩石並研究產生的氣體來了解岩石的化學成分。之前的探測器——火星探測漫遊者專案、火星科學實驗室 和現在的 M2020——已經越來越能夠根據科學標準(例如目標形狀、紋理或紋脈的存在)選擇目標並拍攝後續影像。這種稱為“用於收集更多科學資料的自主探索”(AEGIS) 系統的能力使探測器能夠在更少的時間內進行更多科學研究。
第三,火星 2020 探測器還將擁有更復雜的排程系統,使其能夠更具動態性。如果工作進度超前或落後於計劃,探測器將自動調整其行程,這可以提高探測器的生產力。
人工智慧將如何幫助探測器探索火星洞穴?
雖然我們已經探索了火星表面,但科學家們希望調查火星上的熔岩管洞穴。由於進入洞穴進行通訊更加困難——需要洞穴中的中繼 [點]——而且此類任務可能只會持續幾天,因為探測器將完全依賴電池供電,因此洞穴探索將需要大量人工智慧。人工智慧將幫助協調、繪製地圖並在非常有限的時間內儘可能高效地探索儘可能多的洞穴。我們一直在研究的一種方法是稱為動態區域分配,它可能會以這種方式開始:您有四個探測器,您想進入火星上的一個洞穴 100 英尺。第一個探測器繪製 0 到 25 英尺的地圖,第二個探測器繪製 25 到 50 英尺的地圖,依此類推。他們將逐步繪製洞穴地圖。這是一種典型的分而治之的方法。
他們還互相使用以中繼洞穴外的資料。將探測器傳送到洞穴更深處意味著它們將無法與我們持續通訊。因此,他們開始進行我們稱之為“運動鞋網路”的操作——第一個探測器進入洞穴直到超出通訊範圍,進行觀察,然後返回以重新進入範圍傳送資料。第二個探測器進入洞穴更深處,但只需返回到足以與第一個探測器保持在範圍內的距離,第一個探測器將傳送資料。每個探測器都逐漸深入洞穴,以便覆蓋 100 英尺。將四個探測器想象成一個大型手風琴,它不斷增長和返回。探測器不會離開洞穴,但它們收集的資料會離開洞穴。這將是一項為期三到四天的任務,因為電池只能持續這麼長時間。
人工智慧在太空探索中的終極考驗是什麼?
人工智慧在太空中的終極考驗是持續時間更長的任務。例如,木衛二潛水器必須在沒有幫助的情況下生存數年,可能每 30 天才與地球聯絡一次。在您將潛水器降落在行星表面後,您需要融化冰蓋,這需要一年的時間。然後您想從赤道到兩極來回移動,尋找熱液噴口。就像洞穴中的探測器一樣,它必須外出再返回才能進行通訊。這可能需要一年,也可能需要兩年。在這種情況下,它可能會獨自行動六個月甚至一年。為了模擬這種情況,我們一直在地球上設計一種人工智慧控制的潛水器,以研究冰下的熱液噴口。科學家們希望進入南極冰架下研究氣候變化的影響——這些任務需要類似的技術。
即使這與星際任務相比也算不了什麼,在星際任務中,航天器將完全自主執行,因為往返比鄰星(最近的恆星)的通訊需要九年時間。如果您前往 Trappist-1 系統,該系統更有可能擁有更多宜居行星,那麼距離約為 40 光年。那是在航天器在到達比鄰星所需的 60 年或更長時間後倖存下來的情況下。由於通訊延遲,航天器幾乎是完全自主的——因此,當您發射這樣的任務時,您將需要一個令人驚歎的人工智慧,然後只能祈禱好運了。