大多數機器人由人類工程師設計,他們必須費力地安排每個關節和人造肌肉,以使機器人完成特定任務。這個過程緩慢且受人類想象力的限制;佛蒙特大學的計算機科學家喬什·邦加德說,讓演算法來做這件事可以“幫助開創定製機器人世界”。在一項新的研究中,他和他的同事使用基於反饋的演算法來設計各種blob狀步行機器人,速度創下了紀錄。結果最近發表在美國國家科學院院刊上。
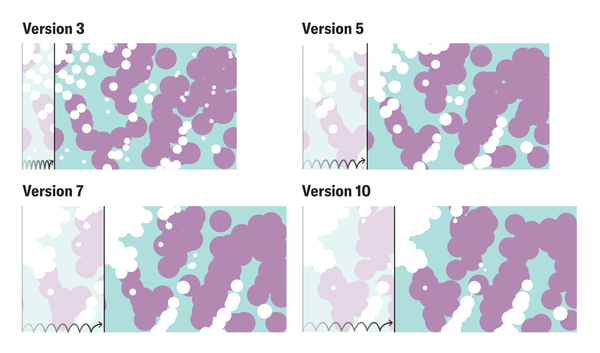
每個機器人最初都是一塊數字模擬的凝膠狀物質磚塊,其中隨機散佈著 64 個孔,就像一塊瑞士乳酪。它還包含 64 個隨機放置的人造肌肉貼片,當彎曲時,會導致其身體附近的部位伸展和收縮。起初,模擬磚塊只是在原地跳躍。但隨著演算法調整肌肉的位置,以及孔的位置和大小,磚塊開始向前跳躍。九個版本之後,孔已經合併,雕刻出了一些粗短的“腿”,這些“腿”已經佈滿了肌肉。由此產生的數字機器人每秒可以移動半個身長的距離——而整個設計過程,團隊重複了 100 次,在筆記型電腦上僅用了 30 秒。
新加坡國立大學的機械工程師塞西莉亞·拉斯基說:“最大的貢獻是他們以非常短的時間,透過非常有限的迭代次數實現了這一切。”她研究軟體機器人,但沒有參與這項新研究。
支援科學新聞報道
如果您喜歡這篇文章,請考慮透過以下方式支援我們屢獲殊榮的新聞報道 訂閱。透過購買訂閱,您正在幫助確保有關塑造我們今天世界的發現和想法的有影響力的故事的未來。
研究人員用矽酮澆鑄了其中一種設計,製作了一個大約半塊肥皂大小的物理生物。對於肌肉,科學家們貼上了微小的氣囊,可以透過泵入脈衝空氣來彎曲。該機器人的行走速度比模擬慢——每分鐘半個身長——但明顯快於隨機設計。
這些最大化運動的調整是由一種稱為梯度下降的最佳化演算法引導的。這項技術為大多數機器學習演算法提供動力,可以找到變數數量龐大的問題的最佳解決方案。在本例中,這些變數是肌肉位置,以及孔的位置和大小。該演算法反覆策略性地修改它們,使系統在每次迭代中都得到改進。
該團隊使用了相同的技術來設計具有其他目標的虛擬機器人,例如運輸或發射物體。接下來,他們希望創造更復雜的機器,利用感測器與世界互動。
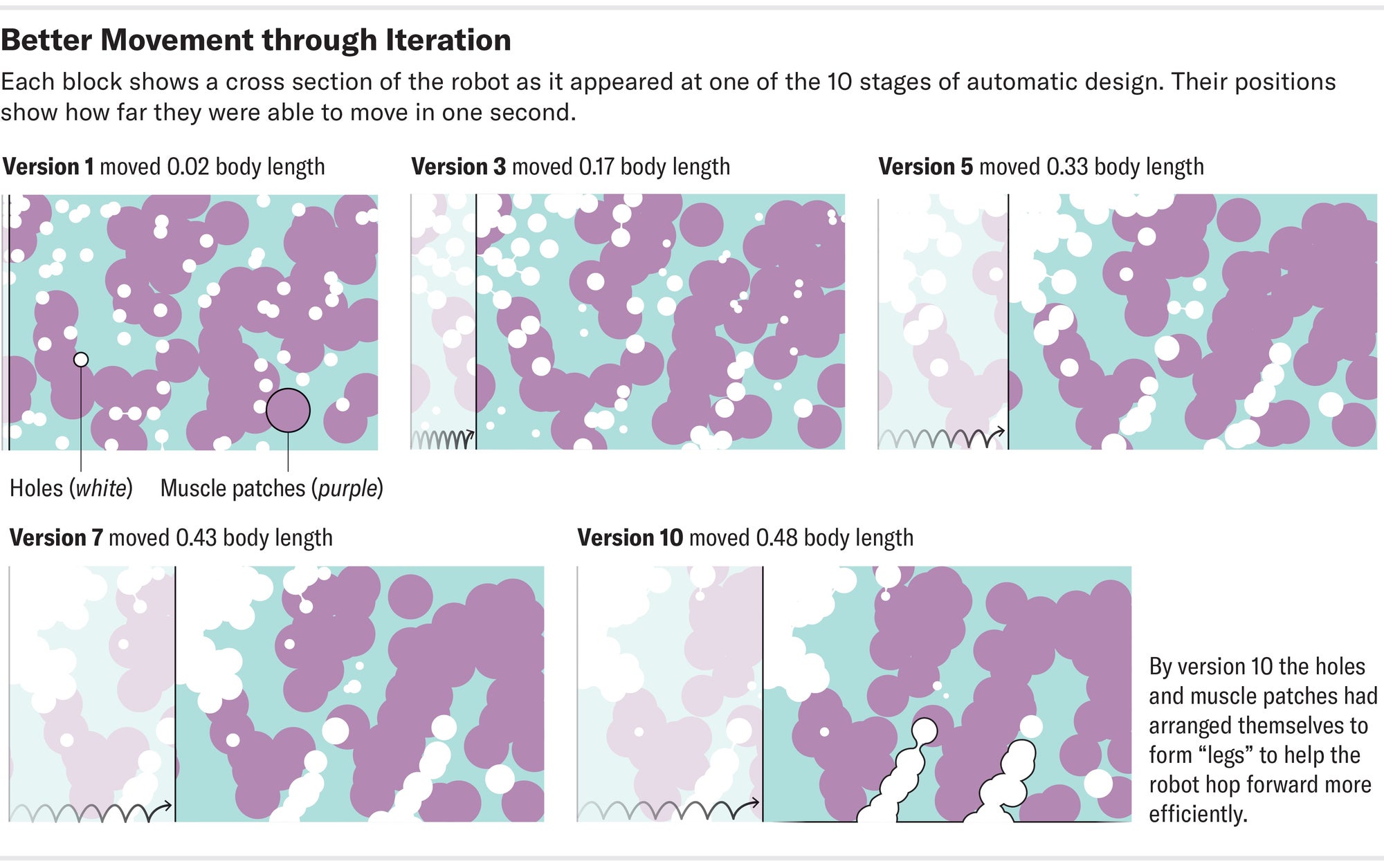
致謝:阿曼達·蒙塔涅斯;來源:David Matthews 等人的“機器人高效自動設計”,刊登於美國國家科學院院刊,第 120 卷;2023 年 10 月 3 日