關鍵概念
工程學
機器人
解剖學
抓握
引言
人的手非常神奇。你可以做一些事情,比如拿起一支鉛筆,使用遊戲控制器或爬上攀爬架,而無需過多考慮。製作一個能做所有這些事情的人工手是一個相當大的挑戰!在這個專案中,你將嘗試製作一個可以拿起小物件的簡單人工抓取器。
背景
人的手有五個手指,每個手指都有多個關節。這些關節由肌肉和肌腱控制——肌肉拉動肌腱,肌腱拉動關節,使它們彎曲。人的手有很多不同的關節,這使得它非常靈活和多功能,並且很容易適應各種不同的任務。你從小就學會使用你的手,當你長大後,你幾乎不必考慮它了!
關於支援科學新聞
如果您喜歡這篇文章,請考慮透過以下方式支援我們屢獲殊榮的新聞工作 訂閱。透過購買訂閱,您正在幫助確保關於塑造我們今天世界的發現和想法的具有影響力的故事的未來。
多年來,工程師們一直試圖製造機器人手,但事實證明,這非常困難。我們在製造擅長特定事情的機器人手方面做得相當不錯。例如,工廠中的機器人抓取器可能被設計用來拿起某個零件並將其螺栓固定到汽車上。但是,如果你試圖讓那個抓取器拿起網球或一杯水,它就完全不起作用了!製造一個像人手一樣多功能的機械手仍然是一個巨大的挑戰。
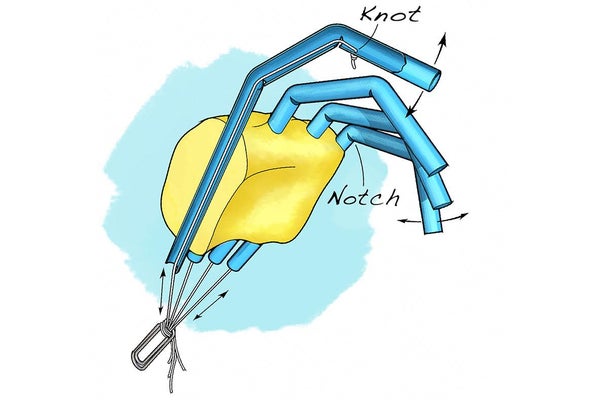
在這個專案中,你將使用吸管和繩子製作一個簡單的人工抓取器。你將在吸管上切出凹口,這些凹口將作為“關節”,並將繩子穿過吸管,作為“肌腱”。拉動繩子將導致關節彎曲。你可以嘗試製作不同型別的抓取器,例如一個簡單的爪狀抓取器,它只有兩個手指,每個手指只有一個關節,或者一個具有多個關節單獨控制的完整的人形手。
材料
塑膠吸管
針(處理尖銳物體時請小心並尋求成人幫助。)
繩子
回形針
橡皮泥
各種要拿起的小物件
剪刀
鑷子(可選)
小橡皮筋(可選)
紙巾筒(可選)
準備工作
將所有材料組裝在一個平坦的工作空間上,該空間有足夠的區域來製作和測試你的作品。
步驟
首先,你將練習製作單個“手指”。使用剪刀(必要時請尋求成人協助)在吸管中間小心地切出一個小的三角形凹口。確保不要完全切穿吸管。這應該允許你在這個點“彎曲”吸管,但是當你鬆開時,吸管應該彈回其原始形狀。這個凹口是你手指的“關節”。
將繩子的一端穿過針眼繫好。
小心地用針刺穿吸管,就在你切出的凹口上方。確保你在切出凹口的一側刺穿吸管,而不是在“背面”。
將針頭一直推入吸管,穿過你切出的凹口,然後從吸管底部穿出。使用鑷子伸入吸管(透過凹口或從底部)抓住針頭並將其拉出可能會有所幫助。你也可以垂直握住吸管並搖晃它,讓針頭掉下來。
繼續拉動針頭,直到大約 10 釐米的繩子從吸管底部伸出。這條繩子將像“肌腱”一樣幫助手指彎曲。
剪斷繩子的另一端,留出足夠的餘量,以便你可以打結。確保結足夠大,不會被拉過你用針刺穿的孔。
解開或剪斷針眼上的繩子。
將繩子的底端系在回形針上。
你剛剛完成了你的第一個“手指”。用一隻手握住吸管的底部。用另一隻手拉動回形針。這應該會導致吸管在凹口處彎曲,類似於手指在關節處彎曲。僅用這一根手指你能拿起什麼?擁有更多手指會有什麼幫助?
現在是時候製作更多手指了!重複以上步驟至少再製作一個手指。你還可以決定每個手指是具有多個關節還是隻有一個關節。如果一個手指確實有多個關節,你可以使用一根繩子來控制所有關節(透過在最後一個關節上方將其繫緊),或者使用單獨的繩子來控制每個關節(透過在每個關節上方的吸管中穿入多根繩子)。
嘗試製作不同型別的手指並透過拉動繩子來控制它們。
現在是時候將一些手指連線成一個抓取器了!你設計和製作的手的型別完全取決於你。請記住,你不必設計一個有五個手指的人手。例如,你可以製作一個帶有兩個鉗子的爪子(像螃蟹或龍蝦),或者一個帶有三個或四個對稱手指的爪子(像在拱廊機器中撿起毛絨玩具的那種)。
嘗試組合多個手指。透過在吸管底部周圍形成橡皮泥,來形成你手的底部或“手掌”。確保你不要蓋住吸管的底部開口,以便你仍然可以拉動繩子。調整橡皮泥可以讓你改變手指相對於彼此的位置和方向。
根據你擁有的橡皮泥型別,你可能需要讓它風乾並變硬,以便你的手能更好地工作。(當橡皮泥仍然很軟時,可能很難使用手。有些型別的橡皮泥可能一開始就足夠硬,可以立即工作。)
當手指安裝在手掌上後,嘗試拉動繩子來控制手指。你可能需要進行一些調整才能使一切正常工作。你認為你可以進行哪些更改來提高你手的效能?
現在嘗試用你的手拿起一些小物件。請記住,你的手是用吸管制成的,所以不是很結實,因此你只能用它來拿起輕巧的物體(例如,空塑膠瓶,而不是裝滿液體的塑膠瓶)。
你的手是否更擅長拿起某些物體而不是其他物體?你能否設計一種專門用來抓取某些物體的手?例如,一種型別的手用來拿起圓柱形物體,如瓶子,另一種型別用來抓取球形物體,如網球?你認為設計一個像人手那樣適應性強的東西會很困難嗎?人手可以輕鬆地拿起形狀非常不同的東西?
額外:將你的機械手的手掌安裝在紙板紙巾筒的末端,並將繩子穿過筒子。現在你就有了一個可以伸長的抓取器,你可以用它來拿起東西!
額外:塑膠吸管可能有點滑,因此請嘗試提高你的機械手的“抓握力”。例如,在吸管周圍纏繞小橡皮筋。提高吸管的“抓握力”是否更容易拿起東西?
觀察和結果
你應該能夠製造一個可以拿起輕物的人工手,例如乒乓球、空塑膠瓶或小型毛絨玩具。用吸管和橡皮泥製造一個可以抓住較重物體的手會很困難。如果你想製造一個更結實的手,你可以用五金店更堅固的材料來替換吸管和橡皮泥(例如,用塑膠管道代替手指,用金屬纜線代替肌腱,用在掌心鑽孔的木製底座)。
製造和控制所有手指和關節都由一根繩子控制的手要容易得多(類似於“拱廊機器”式的爪子,所有手指同時開啟和關閉)。製造一個具有多個單獨控制關節的鉸接手要困難得多——但這不應阻止你嘗試!請記住,你自己的手非常複雜,即使是專業工程師,至今仍在努力製造一個完全功能且等同於人手的機器人手。
因為這是一個工程設計活動,所以沒有特定的公式可以遵循來製造你的手。設計可能非常不同,並且沒有“正確”或“錯誤”的製作方法。你可能會發現某些設計更適合執行不同的功能。如果你用不同數量的手指製造了不同的手,你發現哪一個是最通用的?
更多探索 用吸管抓取:使用吸管制作機器人手,來自科學夥伴
你美妙的手,來自兒童健康
適合所有年齡段的科學活動,來自科學夥伴
此活動由科學夥伴合作提供
