人工智慧可以在筆記型電腦或智慧手機上在 30 秒內設計出一個自主機器人。
現在還不是對任何人都能在公交車站等車時創造出終結者而感到恐慌的時候:正如最近一項研究報告的那樣,這些機器人是簡單的機器,它們沿直線移動,而不會執行更復雜的任務。(然而,有趣的是,它們似乎總是長出腿,而不是像尺蠖一樣蠕動、移動或滑行的結構。)但西北大學計算機科學家兼工程師、研究作者薩姆·克里格曼說,隨著更多的工作,這種方法可以使機器人設計大眾化。
克里格曼說:“當只有大型公司、政府和大型學術機構擁有足夠的計算能力[來使用人工智慧進行設計]時,這真的限制了所提出問題的多樣性。” “提高這些工具的可訪問性是非常令人興奮的事情。”
關於支援科學新聞業
如果您喜歡這篇文章,請考慮透過以下方式支援我們屢獲殊榮的新聞業 訂閱。透過購買訂閱,您正在幫助確保有關塑造我們當今世界的發現和想法的具有影響力的故事的未來。
人工智慧現在可以寫文章 和 駕駛汽車,因此設計似乎是合乎邏輯的下一步。但哥倫比亞大學的機器人專家霍德·利普森說,建立一個可以有效設計現實世界產品的演算法並非易事,他沒有參與這項研究。“仍然存在許多問題,”利普森在談到這項新研究時說,“但我認為這是一個巨大的進步。”
該方法使用模擬進化的一個版本來建立可以完成特定任務的機器人——在這種情況下,是向前運動。以前,建立進化機器人涉及生成隨機變體,測試它們,使用新的變體改進最佳效能者,並再次測試這些版本。克里格曼說,這需要大量的計算能力。
他和他的同事轉而使用一種稱為梯度下降的方法,這種方法更像是定向進化。該過程從機器人的隨機生成的身體設計開始,但它與隨機進化的不同之處在於,它使演算法能夠衡量給定的身體計劃與理想計劃相比的效能如何。對於每次迭代,人工智慧都可以專注於最有可能走向成功的途徑。“我們為[演算法]提供了一種方法來檢視突變是好是壞,”克里格曼說。
在他們的計算機模擬中,研究人員將他們的機器人作為隨機形狀開始,讓人工智慧以發展陸地運動為目標,然後將新生的機器人放任在虛擬環境中進化。僅需 10 次模擬和幾秒鐘即可達到最佳狀態。從最初的、非移動的身體計劃開始,機器人能夠開始以每秒高達 0.5 個身長的速度移動,約為人類平均步行速度的一半,研究人員在 10 月 3 日的《美國國家科學院院刊》上報告。該團隊發現,機器人還不斷進化出腿並開始行走。利普森說,令人印象深刻的是,人工智慧只需幾次迭代就可以從隨機形式中構建出功能性的東西。
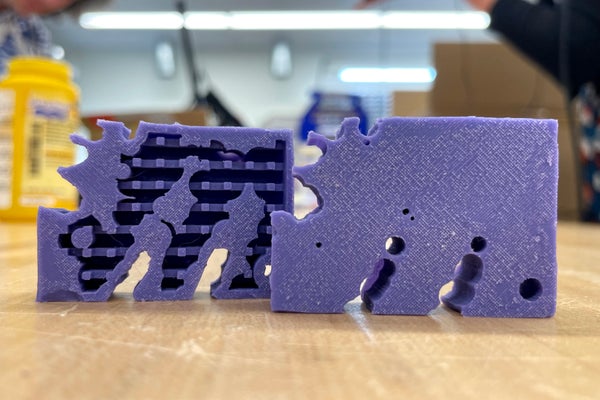
為了檢視模擬在實踐中是否有效,研究人員透過 3D 列印設計模具並用矽膠填充,構建了他們效能最佳的機器人的示例。他們將空氣泵入形狀中的小空隙中,以模擬肌肉的收縮和擴張。由此產生的機器人,每個都只有一塊肥皂大小,像笨拙的小卡通人物一樣爬行。
人工智慧設計了這個小型步行機器人。圖片來源:西北大學
克里格曼說:“我們對它朝著正確的方向移動並且能夠移動感到非常興奮”,因為人工智慧模擬的機器人不一定能轉化為現實世界。
杜克大學榮譽退休教授、加州大學洛杉磯分校研究教授 N. Katherine Hayles 說,這項研究代表著朝著更先進的機器人設計邁出了一步,即使這些機器人非常簡單,只能完成一項任務。她也是《我們如何變成後人類:控制論、文學和資訊學中的虛擬身體》(芝加哥大學出版社,1999 年)的作者。梯度下降法已經在設計人工神經網路或神經網路(受人腦啟發的人工智慧方法)中得到了很好的應用,因此將大腦和身體結合在一起將是強大的,她說。
“在我看來,真正的突破將是當你採用梯度下降法來進化神經網路,並將它們與可進化的身體連線起來時,”海爾斯說。然後,兩者可以共同進化,就像發生在生物體中一樣。
利普森說,能夠設計新產品的人工智慧可以讓人們擺脫各種有害的問題,從設計下一代電池以幫助緩解氣候變化,到尋找目前無法治癒的疾病的新抗生素和藥物。他說,這些簡單的、笨重的機器人是朝著這個目標邁出的一步。
利普森說:“如果我們能夠設計出可以為我們設計事物的演算法,那麼一切皆有可能。” “我們將經歷一次令人難以置信的飛躍。”